
질문 요약
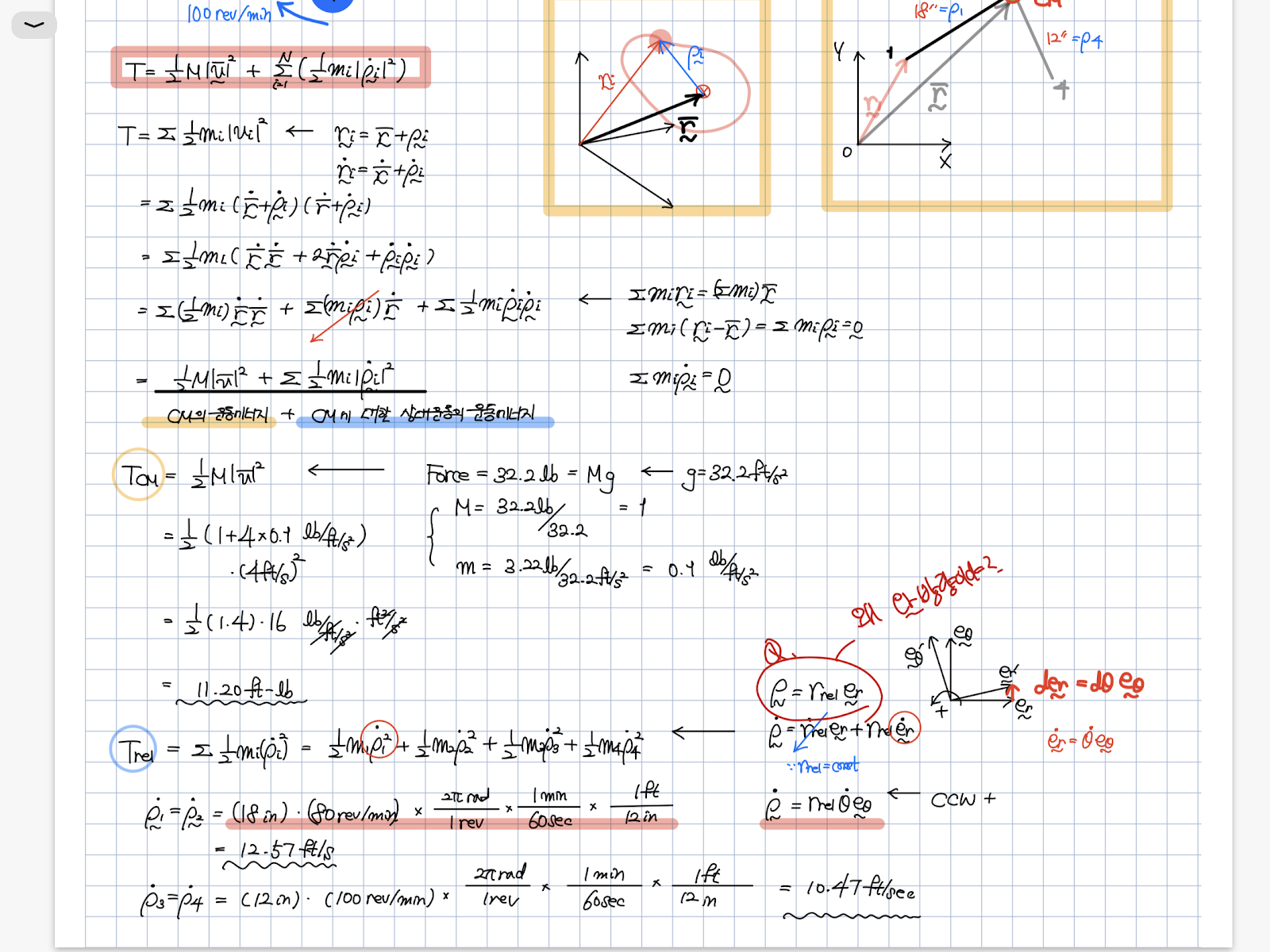
마지막에 pi 방향이 왜 er 방향인지 궁금합니다. 문제에서 좌표계를 지정하지 않아서 pi 방향을 er 방향으로 설정한 것인지 알고 싶습니다. 보통 er 방향이 ri 방향으로 생각되지 않아서 질문드립니다. (질문 시 사용한 이미지: https://lh3.googleusercontent.com/d/1QGcFh1oXRPO2LcgsE0j3MNHZbk7KDHGY)
답변 요약
Rigid body에 대한 개념을 잘못 이해하신 것 같습니다. CM(질량 중심)을 기준으로 각 물체로 뻗어나가는 변위가 rho_i이기 때문에, 회전 중심을 기준으로 뻗어나가는 방향인 er로 설정하는 것이 바람직합니다.
Unsplash 추천 이미지 (키워드 : Physics, Dynamics, Vector Direction, Rigid Body, Polar Coordinates, Angular Displacement )

pi 방향이 er 방향인 이유
기계공학 및 물리학을 공부하다 보면, 물체의 회전 운동을 분석할 때 자주 사용되는 개념 중 하나가 바로 좌표계입니다. 특히, 자유좌표계와 관련된 문제를 풀 때, 방향 벡터의 설정은 매우 중요합니다. 이번 글에서는 'pi 방향이 왜 er 방향인지'에 대한 궁금증을 해소하고자 합니다.
질문 분석
질문자의 질문은 다음과 같습니다:
마지막에 pi 방향이 왜 er 방향인지 궁금합니다. 문제에서 좌표계를 지정하지 않아서 pi 방향을 er 방향으로 설정한 것인지 알고 싶습니다. 보통 er 방향이 ri 방향으로 생각되지 않아서 질문드립니다.
위 질문을 통해 몇 가지 중요한 개념을 파악할 수 있습니다. 여기서 pi와 er는 각각 변위 벡터와 회전 중심 벡터를 나타냅니다. 질문자는 특히 이 두 방향 벡터가 왜 동일한지를 궁금해하고 있습니다.
rigid body와 변위 벡터
먼저, rigid body(강체)에 대한 개념을 이해하는 것이 중요합니다. 강체란 물체의 모든 점 사이의 거리가 일정하게 유지되는 물체를 말합니다. 강체의 주요 특징 중 하나는 변형이 없다는 것입니다. 따라서, 강체의 운동을 분석할 때는 주로 질량 중심(Center of Mass, CM)을 기준으로 합니다.
질량 중심을 기준으로 각 물체로 뻗어나가는 변위 벡터를 $\rho_i$라고 정의합시다. 이 변위 벡터는 물체의 질량 중심에서 특정 지점까지의 벡터를 의미합니다. 이때, 변위 벡터는 다음과 같이 표현될 수 있습니다:
$$ \rho_i = r_i - CM $$
여기서 $r_i$는 특정 지점의 위치 벡터이고, $CM$은 질량 중심의 위치 벡터입니다.
회전 운동과 er 좌표
회전 운동을 분석할 때, 회전 중심을 기준으로 하는 것이 일반적입니다. 회전 중심을 기준으로 뻗어나가는 방향 벡터를 er로 설정하는 것이 바람직합니다. 이는 회전 운동의 특성상 회전 중심에서 물체의 각 지점으로 뻗어나가는 방향 벡터가 중요하기 때문입니다.
회전 운동에서 변위 벡터 $\rho_i$는 회전 중심에서 특정 지점까지의 벡터입니다. 따라서, 회전 중심에서 특정 지점으로 뻗어나가는 방향 벡터는 자연스럽게 er 방향 벡터가 됩니다.
pi 방향과 er 방향의 일치
질문자의 궁금증은 'pi 방향이 왜 er 방향인지'에 대한 것입니다. 이를 이해하기 위해서는 회전 운동의 좌표계를 다시 한 번 생각해봐야 합니다. 회전 운동에서 변위 벡터 $\rho_i$는 회전 중심에서 특정 지점까지의 벡터입니다. 여기서 회전 중심에서 특정 지점으로 뻗어나가는 방향 벡터는 er 방향 벡터입니다.
따라서, 변위 벡터 $\rho_i$의 방향은 자연스럽게 er 방향과 일치합니다. 이는 $\rho_i$가 회전 중심에서 특정 지점까지의 벡터이기 때문입니다. 이 방향 벡터가 pi로도 표현될 수 있습니다. 따라서, pi 방향이 er 방향과 일치하는 것은 좌표계의 특성상 당연한 결과입니다.
결론
마지막으로, pi 방향이 er 방향인 이유는 변위 벡터 $\rho_i$가 회전 중심에서 특정 지점까지의 벡터이기 때문입니다. 회전 운동에서는 회전 중심에서 특정 지점으로 뻗어나가는 방향 벡터가 er 방향 벡터로 설정됩니다. 따라서, 변위 벡터 $\rho_i$의 방향은 자연스럽게 er 방향과 일치하게 됩니다. 이는 좌표계의 특성상 당연한 결과입니다.
이 글이 pi 방향과 er 방향의 일치에 대한 궁금증을 해소하는 데 도움이 되었기를 바랍니다. 추가적인 질문이 있다면 언제든지 댓글로 남겨주세요.
유니스터디 바로가기 : https://www.unistudy.co.kr/megauni.asp
학습Q&A 바로가기 : https://www.unistudy.co.kr/community/qna_list.asp

![[진동학] mck 질량시스템과 진동학 (vibration, dynamics, mck system, vibration damping, spring system, oscillating system)](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_tB7JKeQ1C8mJgUCwOXcAQsl5s07DcBnq_BGdppNkvpqORt1Bxf4S9P1FCH0Cqx9Vst3R8o3myoaVXr4sgaV1rpeT0UMievrsw9ugGEPrekhrfDzs7IUPZ4-KZklqRLSov4jaHCiL7i_qIewAZLMraffICwBAKfJF1alozuQah3lvm6aGlWXUHKWHTGQ4HrDkgHQpnBOckeWpgTvz93oFmrmQ4a7lzQO8GAyb3ydfVok4SFG6DONLraOm4WJm4BbKdx8Lc_cC-6cnLDUJNeQVqOTPiYiLV02Bs0ZDF16iAJGiKSVzqtEj5_hSRvqqtUntTlxWmO193eKatKLOyYbXVe-6deWrvyCQDyW8ZTzWvBfB32vD4lqNsonfVh6mEn9Yfpn4TGrk_H7s43ybyQDZcj1UBPwMh0_0lwqWkSY7mKomdr-5U8ZrkUuHKxXlfpwgHeDefylxRcNl27Z_87Lui7yXXsxDSVeug=w72-h72-p-k-no-nu)






0 댓글