
질문 요약
첫 번째 첨부파일에서 x를 가정할 때, F0Coswt와 같이 오른쪽으로 가해진 힘은 xcoswt로 가정하는 것이 맞나요? 만약 F0Sinwt+psi라면 XSinwt+psi로 가정하는 것이 맞나요? 뒷장에서 x=ASin(Wnt+psi)나 x=ae^(st)를 암기해야 하나요? 아니면 이런 식으로 가정하는 이유가 있나요? 두 번째로, c^2-4mk 값이 c보다 크면 감마가 양수일 수 있는데 왜 distinct negative real number라고 하나요? (질문 시 사용한 이미지: https://lh3.googleusercontent.com/d/10lRCTaTtWZNNjaBktdHu9mpuH9FS5gB9, https://lh3.googleusercontent.com/d/1HFU5d76qZeWgXXu1KcPTSv83ippA0Njs)
답변 요약
첫 번째 질문에 대한 답변: 미분 방정식에서 particular solution을 가정할 때, 힘이 cos 형태로 주어진다면 cos 형태로 가정하는 것이 일반적입니다. 하지만 반드시 그래야 하는 것은 아닙니다. 예를 들어, Rotating Imbalance 문제에서는 sin 형태로 가정해서 문제를 풀기도 합니다. 이는 분석하려는 시스템의 벡터 방향이나 풀이 방법에 따라 다를 수 있습니다. 따라서, 본인이 편한 방법으로 가정하여 미분 방정식을 풀면 됩니다. 두 번째 질문에 대한 답변: damping이 있는 경우에는 Overdamping, Underdamping, Critically Damped Motion에 따라 달라집니다.
Unsplash 추천 이미지 (키워드 : vibration, damping, oscillation, differential equations, mechanics, sine wave, cosine wave, mechanical engineering, dynamic systems, complex analysis )

[진동학] 진동학 질문
진동학에 대한 질문을 주셔서 감사합니다. 아래에서 각 질문에 대해 상세히 답변드리겠습니다.
질문에 첨부된 이미지:

- 첨부파일의 힘 가정에 관한 질문
- 감쇠 계수에 관한 질문
- Overdamping: \(c^2 > 4mk\)
- Critically Damped: \(c^2 = 4mk\)
- Underdamping: \(c^2 < 4mk\)
첫 번째 첨부파일에서 x를 가정할 때, \(F_0 \cos(\omega t)\)와 같이 오른쪽으로 가해진 힘을 xcos(\(\omega t\))로 가정하는 것이 맞나요? 만약 \(F_0 \sin(\omega t + \psi)\)라면 Xsin(\(\omega t + \psi\))로 가정하는 것이 맞나요? 뒷장에서 \(x = A \sin(\omega_n t + \psi)\)나 \(x = ae^{st}\)를 암기해야 하나요? 아니면 이런 식으로 가정하는 이유가 있나요?
먼저, 진동 시스템에서 강제 진동(External Force)을 고려할 때, 힘의 형태에 따라 상응하는 특수해(Particular Solution)를 가정하는 것이 일반적입니다. 예를 들어, 외부에서 주어지는 힘이 코사인 형태라면 특수해도 코사인 형태로 가정하는 것이 자연스럽습니다. 이는 시스템의 응답이 외부 힘의 주기와 일치하기 때문입니다.
따라서, 힘이 \(F_0 \cos(\omega t)\)로 주어졌다면, 시스템의 응답을 \(x \cos(\omega t)\)로 가정하는 것이 맞습니다. 같은 원리로, 힘이 \(F_0 \sin(\omega t + \psi)\)로 주어지면 응답을 \(X \sin(\omega t + \psi)\)로 가정하는 것이 일반적입니다.
이러한 가정은 미분 방정식을 풀기 위한 일종의 트릭(Tool)입니다. 코사인이나 사인 형태로 가정하는 이유는 주어진 외부 힘의 주기성을 그대로 반영하여 미분 방정식을 쉽게 풀 수 있게 하기 때문입니다. 따라서 응답을 암기하는 것이 아니라, 외부 힘의 형태에 맞게 응답을 가정하는 이유를 이해하는 것이 중요합니다.
\(x = A \sin(\omega_n t + \psi)\)나 \(x = ae^{st}\)는 대표적인 일반해(General Solution)입니다. 이는 시스템의 자연 진동 모드(Natural Modes)를 나타내며, 초기 조건에 따라 결정됩니다. 외부 힘이 없는 경우의 고유 진동수(\(\omega_n\))와 감쇠 상수(\(s\))에 따라 다르게 나타납니다.
두 번째로, \(c^2 - 4mk\) 값이 \(c\)보다 크면 감마가 양수일 수 있는데 왜 distinct negative real number라고 하나요?
여기서 \(c\), \(m\), \(k\)는 각각 감쇠 계수, 질량, 스프링 상수를 의미합니다. 감쇠가 있는 경우에는 Overdamping, Underdamping, Critically Damped Motion의 세 가지 경우가 존재합니다. 이를 이해하기 위해서는 시스템의 특성 방정식을 살펴봐야 합니다.
제어 시스템에서 나타나는 2차 미분 방정식은 일반적으로 다음과 같은 형태를 가집니다:
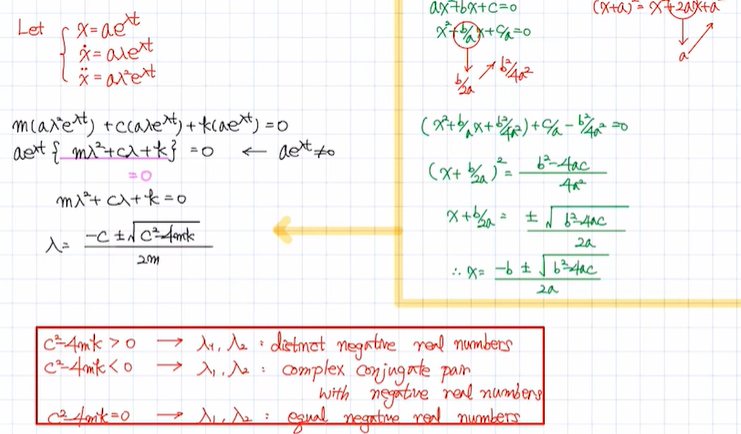
\[ m \ddot{x} + c \dot{x} + kx = 0 \]
이 미분 방정식의 특성 방정식은 다음과 같습니다:
\[ ms^2 + cs + k = 0 \]
이를 풀면 다음과 같은 두 근을 얻게 됩니다:
\[ s = \frac{-c \pm \sqrt{c^2 - 4mk}}{2m} \]
여기서 \(c^2 - 4mk\)의 값에 따라 세 가지 경우로 나뉩니다:
이 경우, 근이 서로 다른 두 개의 실수 근을 가지며, 둘 다 음수입니다. 따라서 "distinct negative real numbers"라고 합니다.
이 경우, 두 근이 같아집니다. 즉, 중복된 실수 근을 가지며, 음수입니다.
이 경우, 두 근이 서로 다른 복소수 근을 가지며, 실수부가 음수입니다. 즉, 복소수 근의 실수부가 음수이기 때문에 감쇠가 발생합니다.
따라서, \(c^2 - 4mk\) 값이 \(c\)보다 큰 경우, 두 근은 서로 다른 음의 실수 근이 됩니다. 이를 "distinct negative real numbers"라고 합니다. 이는 시스템이 Overdamped 상태에 있음을 의미하며, 시스템은 빠르게 진동하지 않고 천천히 원점으로 돌아갑니다.
이상으로 진동학에 대한 질문에 대한 답변을 마치겠습니다. 추가적인 질문이 있으시면 언제든지 문의해 주세요.
유니스터디 바로가기 : https://www.unistudy.co.kr/megauni.asp
학습Q&A 바로가기 : https://www.unistudy.co.kr/community/qna_list.asp

![[진동학] mck 질량시스템과 진동학 (vibration, dynamics, mck system, vibration damping, spring system, oscillating system)](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_sQnLNc4tmrxthny8DFn5GxnB9tAeX930rNoau3xf3De_nXXnqemvPoMv64AhkObxmMltUC-qH_qLF08bhg6Rl5cnyg2R1bWeAf7iAitobRmRx6hE_7z6dRvV_VckSCFTd3k6N_aQ5aezcE33htpCfR0Ho_OH5LwF3u_ENDjvqpmo7tjM7wgwFdwHLjGi0BXg4XZdRXo04TmCbjL-s3aYkYPol2fJuiidjWJbUzGAW3YRjLtKZXgv67J88j4saiFYIp_2EXBk5wlQi1FlttMvy0lMFjEqI3E0eEYF5aP3VrxsZWDaY_hrzCKscL7A8BCoXE5GtsgkUx4TruJdku9BIQK5EiuKVwTH2W56JWfbumn3EzWoYVkukTWPmYdpE0XzcwKba93jfKZohbtNMAVcY3TsEdhH6HVDou9E5csLUwZwdYYhsuJHRftyMC3X4XcJ3reuUuMkyewiohW4lAv430bA7Iq8drBzM=w72-h72-p-k-no-nu)






0 댓글